
Ubuntu 22.04/24.04 开发环境配置指南
本文面向带 NVIDIA GPU 和图形界面的 Ubuntu 桌面开发机(适用 22.04/24.04),覆盖基础开发工具、NVIDIA 驱动选择、CUDA Toolkit、Python 环境管理、PyTorch、GitHub SSH 配置、VS Code、中文输入法和 ROS 2。
2026-02-22
我是香港城市大学(CityUHK)机器人方向的在读研究生,本科毕业于华南理工大学(SCUT)机器人工程专业。我的研究与实践涉及:视觉感知、操作抓取、移动导航、灵巧手、MuJoCo、Isaac Lab、机器学习、LLM 与 Agentic AI。
2022 年底我与朋友们创建华工 RobotIC 机器人实验室,在张东副教授指导下参加 2023、2024 两届ROBOCON,并获得全国一等奖。我曾在舞肌科技、vivo AI Lab和深圳科创学院实习。在这些地方我成长许多。
我认同开源和信息流通的价值,GitHub 记录了我的一些探索。另外,我曾作为技术支持参与 B 站up主“新石器公园”机器人与 AI 系列视频的制作,总播放量达 400 万。
我是一名全栈机器人工程师,致力于打造通用智能机器人,在更长远的未来,我志向于为人类航天与宇宙探索贡献力量。
I am a graduate student in Robotics at City University of Hong Kong (CityUHK), previously received my bachelor’s degree in Robotics Engineering from South China University of Technology (SCUT). My research and practice involve: visual perception, robotic manipulation and grasping, mobile navigation, dexterous hands, MuJoCo, Isaac Lab, machine learning, LLMs, and Agentic AI.
At the end of 2022, my friends and I founded the RobotIC Lab at South China University of Technology. Under the supervision of Associate Professor Dong Zhang, we participated in the 2023 and 2024 ROBOCON competitions and won a National First Prize. I have interned at Wuji Technology, vivo AI Lab, and Shenzhen InnoX Academy. I have grown a lot in these places.
I believe in the value of open source and the free flow of information, and GitHub records some of my explorations. In addition, I contributed technical support to the production of Bilibili creator “Neolithic Park“‘s robotics and AI video series, which has accumulated over 4 million views.
I’m a full-stack roboticist dedicated to developing general-purpose intelligent robots, and in the longer term, contribute to humanity’s exploration towards space and cosmos.
本文面向带 NVIDIA GPU 和图形界面的 Ubuntu 桌面开发机(适用 22.04/24.04),覆盖基础开发工具、NVIDIA 驱动选择、CUDA Toolkit、Python 环境管理、PyTorch、GitHub SSH 配置、VS Code、中文输入法和 ROS 2。
我常说自己在本科四年只读了四本书。本文记录我与这四本书的交集,也是我从“信息消费者”走向“信息创造者”的路径、反思与致谢。“这个世界可以更美好,我们可以参与建设它。”
这是一场面向大众的分享讲稿,回到计算机与信息科学的本质:信息如何被表示、压缩、存储与计算,并延伸至 AI 与现实世界的技术体系。适合作为计算机/信息科学的入门与全景地图。涉及:二进制与编码、多模态信息(图像/视频/音频)、压缩与加密、存储与内存、算法与复杂度、Web/APP 与软件工程、计算机网络、协作开发、人工智能。
我们发起了一个开源公益项目:华工手册。它聚合分散在各处的校园信息,为学生、教职工、后勤、家属与校友提供统一入口,让信息更易获取、协作减少重复、校园不再是信息孤岛。
本文向大家介绍RSS,一种获取信息的模式。介绍我如何用订阅制重建信息来源、降低遗漏、减少信息过载,以及我对“信息流通、信噪比、偏见与工具”的理解。
Awesome-Robotics-Embodied-AI My notes on robotics and embodied AI. Those highlights are my recommendation.
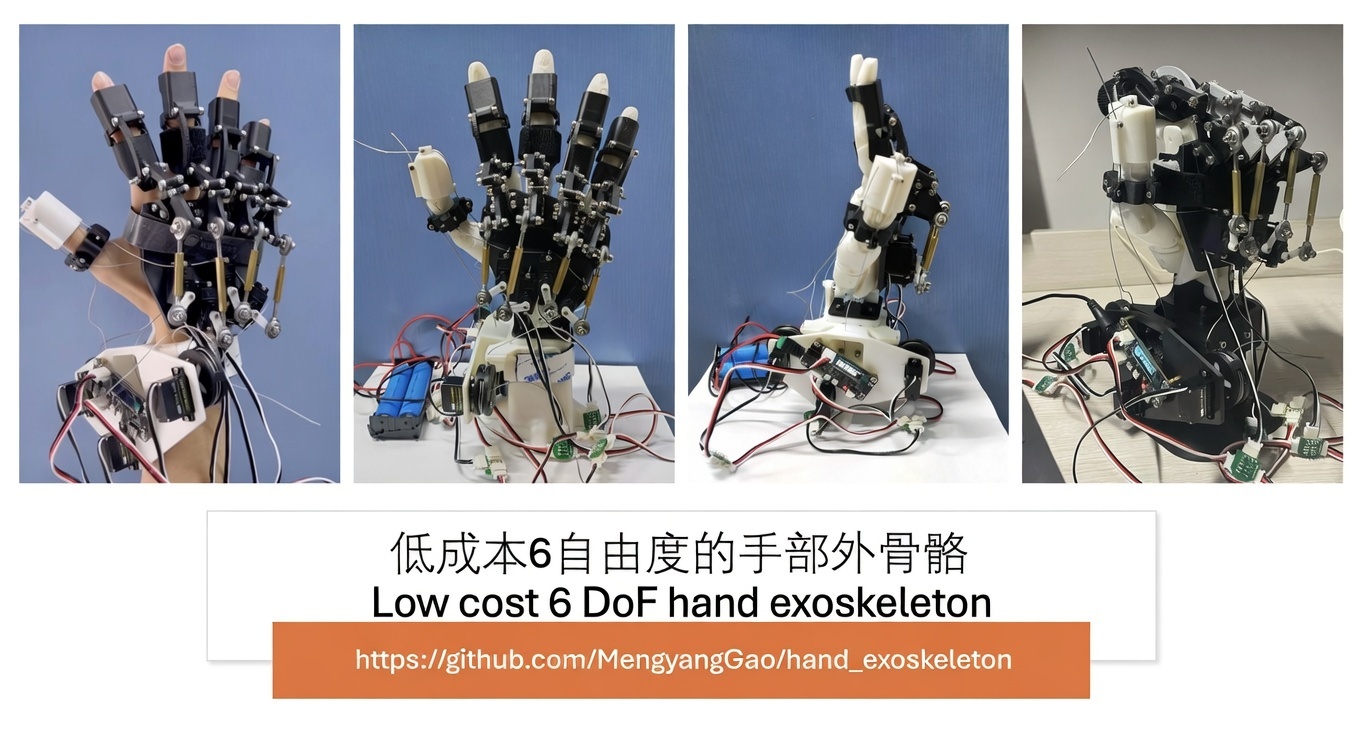
A low-cost 6DoF hand exoskeleton using linkage and tendon mechanism under ESP32.

《离开遥控器,机器人能干什么?》 近年来,人形机器人的发展令人瞩目,但许多人质疑它们是否真的能独立完成任务。本期视频从技术角度探讨机器人自主导航的核心问题——SLAM(同步定位与地图构建)和路径规划算法,分析传统方案与AI新思路的优劣。我们也会思考:为什么成熟的导航技术仍无法满足真正通用的家庭机器人需求?或许,空间智能才是关键。未来,机器人可能需要像生物一样理解空间,才能真正融入人类生活。

我们深入探讨了机器人驱动方式的变革,从液压驱动到电机驱动的转变过程。 详细阐述了液压驱动的基本原理,包括液压泵、管路、阀门等部件如何协同工作来控制机器人关节的运动。然后,文章转向电机驱动,从简单的电磁铁原理出发,逐步介绍了有刷直流电机、无刷直流电机、交流电机(包括异步电机和同步电机)以及直线电机的工作原理和特点。如今已能通过减速器等部件,巧妙解决扭矩不足的问题,实现高效、灵活的关节驱动。展示了电机驱动在机器人领域的崛起和优势,最终得出结论,电机驱动已经成为机器人研究的主流方向,为机器人的未来发展提供了更广阔的空间

本视频从近期热门的机器人拳击视频切入,回顾十年间机器人技术的发展历程,通过对比2015年DARPA机器人挑战赛中机器人表现与现今机器人能力的飞跃,揭示人工智能技术尤其是深度强化学习的进步对机器人发展的关键推动作用。视频详细介绍了机器人从简单行走、平衡保持到复杂技能(如跑酷、空翻、打篮球)的学习过程,涉及虚拟仿真训练、强化学习与深度学习结合、传感器数据利用等技术细节,同时强调中国在机器人领域的技术突破与贡献。最后以宇树科技的发展历程为例,展现中国在机器人研发领域的崛起与影响力 我们独家拆解AI机器人封神之路: ✅ 从"走两步就摔"到"跑酷空翻":揭秘深度强化学习如何让机器人自学成材 ✅ 英伟达黑科技Isaac Gym:2000个虚拟机器人集体"内卷"的硬核训练法 ✅ 超越波士顿动力!中国团队用"动作编码器"实现手脚并用绝技
从本田ASIMO的黯然退场,到波士顿动力机器人惊艳却难落地的后空翻,再到如今ChatGPT加持下的人形机器人热潮——具身智能究竟是颠覆未来的技术革命,还是资本精心包装的又一场泡沫? 本视频深度拆解机器人技术70年来的发展困局:为什么传统方法(如精密控制、几何运动学)让机器人行动迟缓如树懒?为什么AI已在语言和视觉上碾压人类,机器人却仍像个“无脑铁疙瘩”?2011年,Pieter Abbeel用强化学习教会机械臂叠毛巾,为何这一技术路径直到今天才迎来爆发? 我们追溯从达芬奇机械战士、WABOT-1双足机器人到现代人形机器的技术变迁,揭秘激光雷达与视觉感知的路线之争,解析Paden-Kahan运动学子问题如何简化机械臂控制,并探讨大模型能否让机器人真正“开窍”。 当资本狂欢遭遇现实骨感,具身智能的未来究竟在哪?
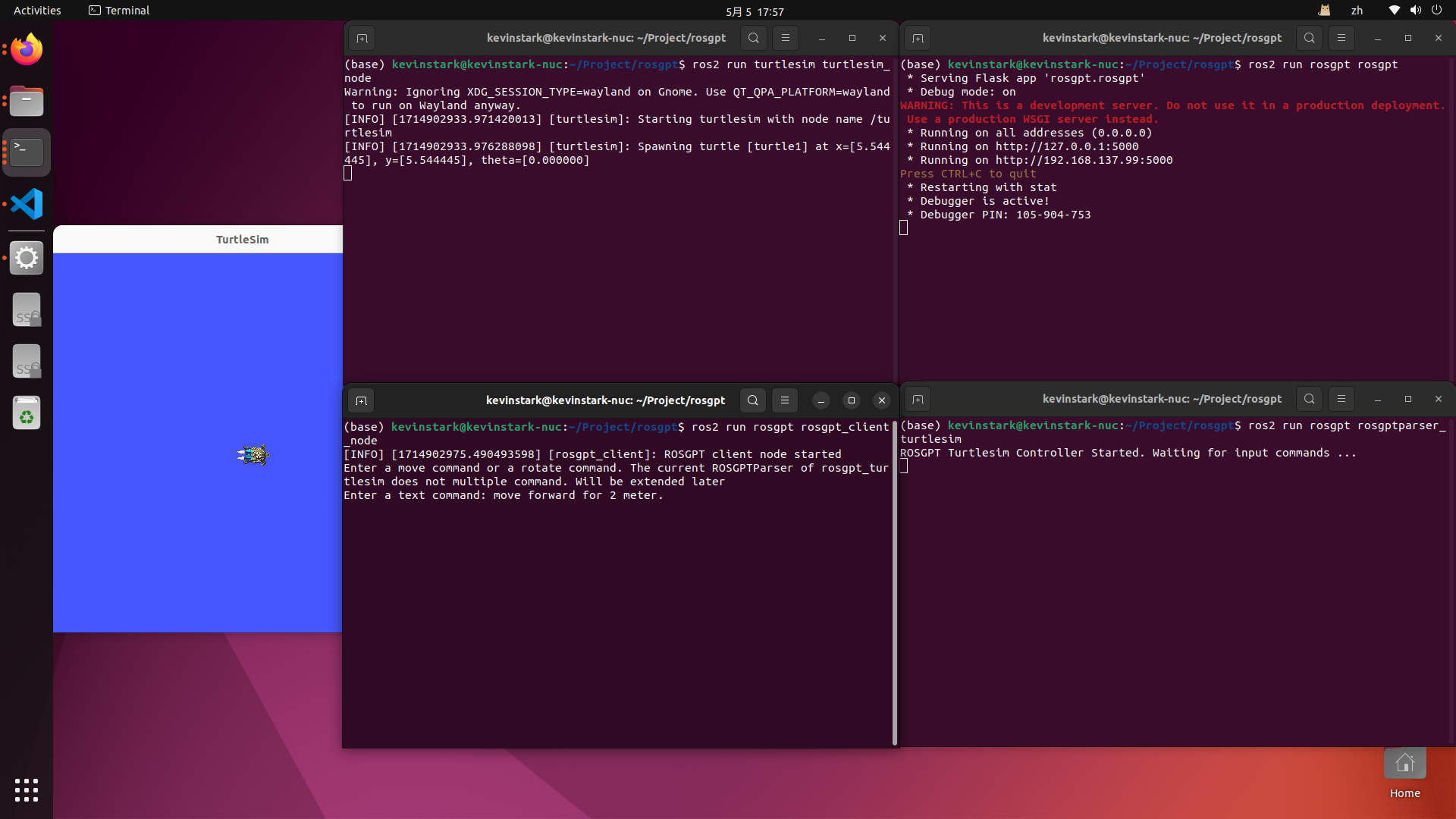
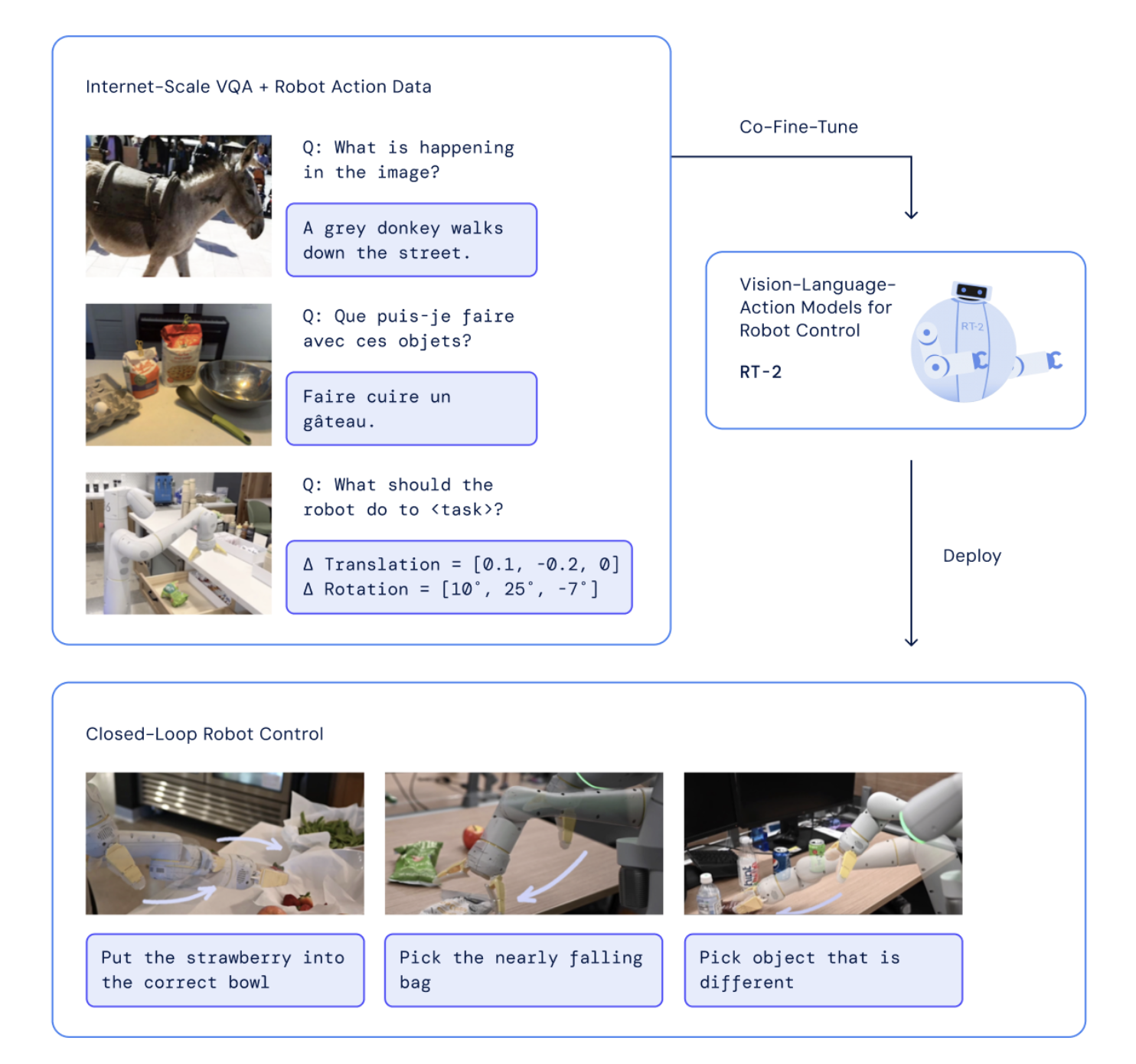
Use LLM to understand user input and control the robot under ROS
Mengyang Gao's Personal Site Template

Using LLM and RAG to build a Q-A system based on specific knowledge. GUI is implemented by Streamlit.

周末愉快!一下子就十二月啦。 过段时间再上传一个更丰富织体、更熟练的版本。几首的原调也摸过了,或许再研究研究如何尽可能原调和谐地改编? 《冰梦》是一首高中校园乐队原创歌曲,来自2019年广州二中的“IF乐队”,详见【【创音】广州二中29th创作人音乐会 IF乐队《冰梦》】 https://www.bilibili.com/video/BV1kJ411x7eY